
在现场将数码规划的世界与真实世界连接起来。它对建筑实物进行扫描,为建筑的数字版孪生兄弟提供持续更新,并通过打印注释和信息,以帮助工人更高效地执行任务。
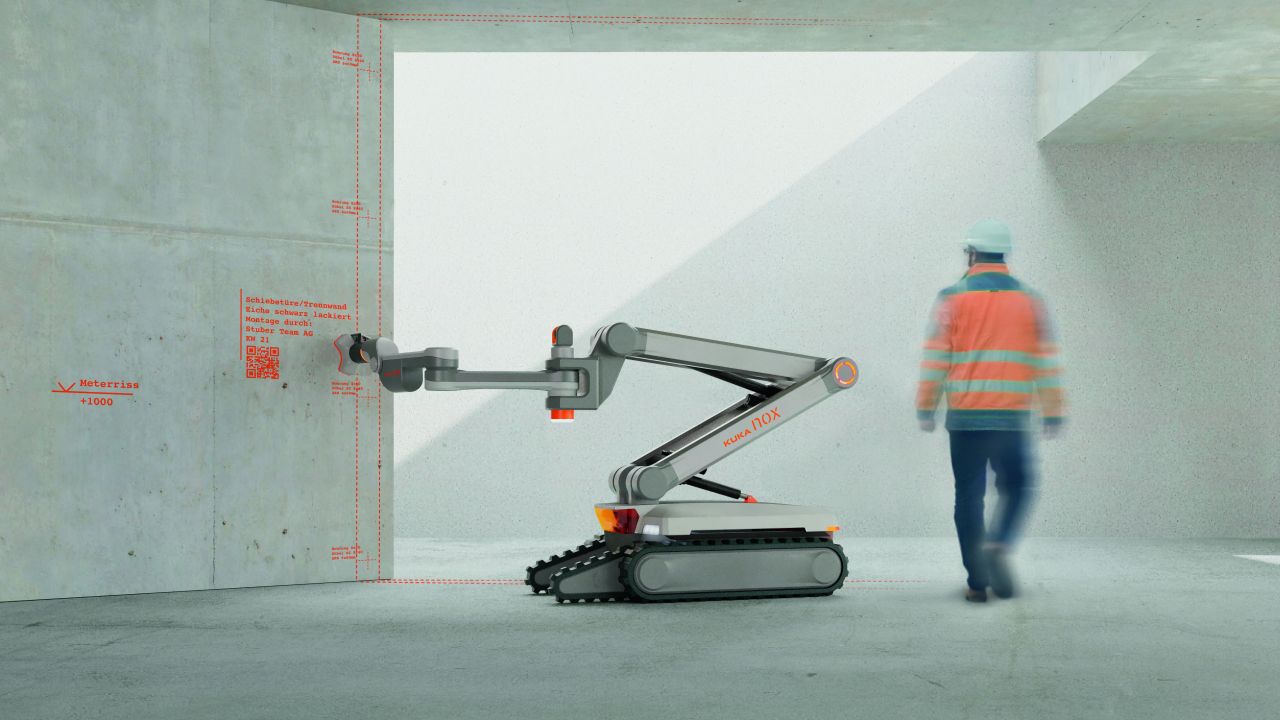
机器人技术是建筑行业中缺失的一环,它将以高效和可持续的方式将规划和工程的数字世界与现场的真实世界连接起来。为了填补这一空白,NOX施工机器人通过在将要执行下一个施工任务的相应地点直接打印基本信息,在现场将建筑的数字数据转换为现实。
有了这些额外的信息,工人可以立即高效地开始执行任务,重点关注他们的技术技能和创造性的问题解决能力。机器人自动、准确地应用这些标记,并始终按照最新版本的施工计划进行更新。这有助于防止工人的误读和无效准备,以及避免不完整的任务描述。

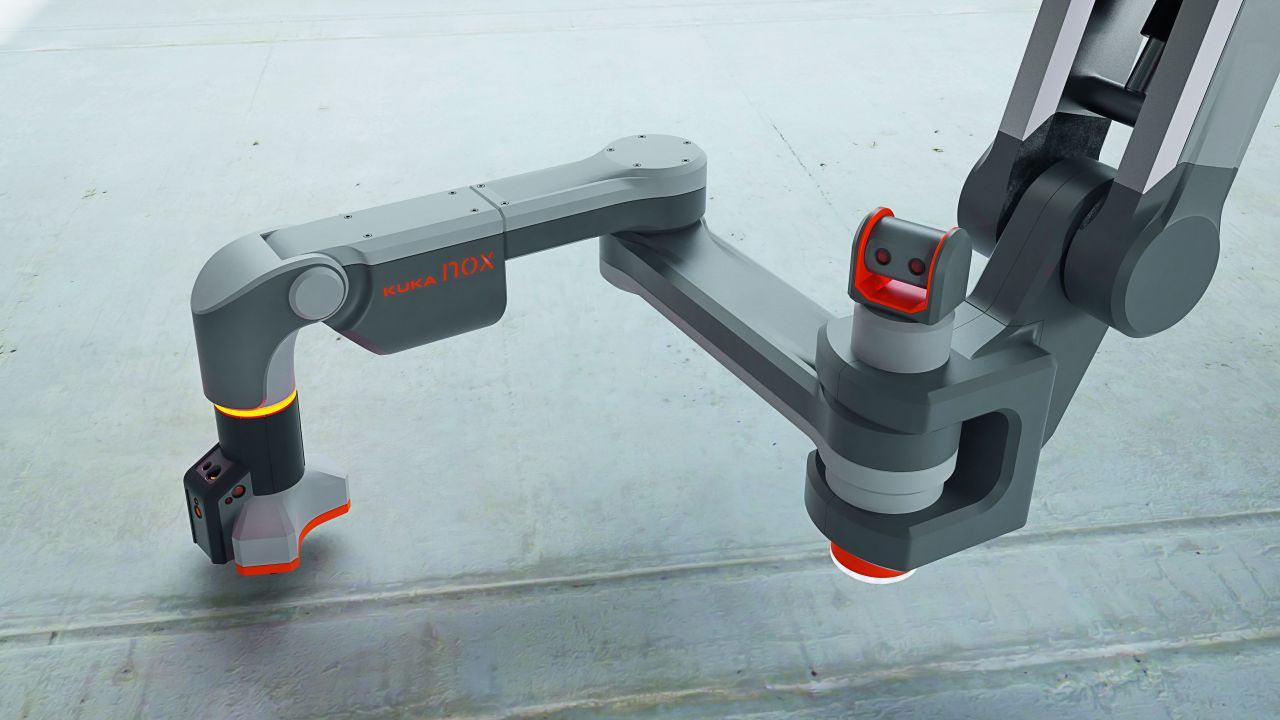
为了通过数字化产生真正的价值,数据传输循环必须关闭,这意味着信息必须从实际执行中流回数字模型。该机器人的主要目标不仅是将数据带到现场,还可以以高分辨率自动三维扫描现场,并记录每天的进度。通过将数据传回,虚拟建筑模型会得以不断更新。这一过程不仅使建筑工程师受益,并对客户和建筑师也非常有价值,他们可以随时随地访问其建筑工地的最新数字版“孪生兄弟”。
在这个场景中,人类和机器人作为一个团队协作。每天晚上,施工机器人NOX都会扫描现场并打印第二天任务的标记。这一准备工作以及衍生的待办事项清单,指导工人完成白天的任务,确保他们的优势得到最大化的发挥。

通过将这些耗时、费力且容易出错的工作委托给机器人,可有效避免施工错误。施工机器人NOX在可持续数字化方面填补了一个重大缺口,减少了施工时间和成本,同时以可持续的方式提高了现场的效率和质量。
人员配备:
企业:KUKA Deutschland GmbH, Germany
设计领队:Dr. Martin Riedel设计:Tom Clauder, Lukas Hilfiker
获奖作品推荐